Filters instellen. Je hebt het nodig! Elke toepassing vereist een op maat afgestelde sensor en in sommige gevallen heeft een sensor een
softwarematig filter nodig om optimaal te kunnen presteren. In dit artikel geven we antwoord op een aantal belangrijke vragen: welke filters zijn er? Hoe kan ik deze filters instellen? En hoe werken deze filters? Lees verder en kom erachter welke filters er zijn voor de
ultrasoon sensoren van microsonic.
F00 – Geen filter geactiveerd
Zonder filter wordt elke afstandmeting ongefilterd gemeten. Deze filterinstelling wordt voornamelijk gebruikt tijdens metingen onder ‘laboratorische’ omstandigheden en wordt niet aangeraden om te gebruiken in industriële toepassingen.
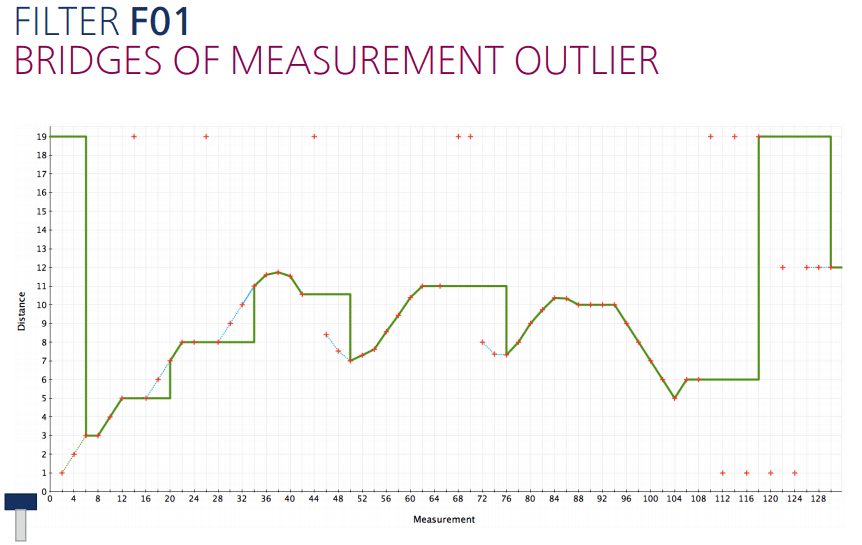
F01 – Standaardfilter
Met dit filter is het mogelijk om pieken uit de meting te filteren. Door de hold-time van een snel veranderende waarde aan te passen, of zelfs nagenoeg uit te schakelen, kan bepaald worden welke piekwaarden geaccepteerd worden als daadwerkelijke meetwaarde. Dit filter is de beste keuze voor de meeste toepassingen.
F02 – Middelend filter
Deze filterinstelling is de standaardinstelling voor analoge ultrasoon sensoren om afstandsverandering te verzwakken. Bij bijvoorbeeld trillingen kan dit filter toegepast worden, hiermee worden de snel opvolgende afstandsveranderingen uitgevlakt en blijft de uitgangswaarde stabiel. Deze zal alleen uitschieten wanneer in de betreffende situatie de afstand dusdanig afwijkt van de ‘standaard’ trillingen die aanwezig zijn.

F03 – Voorgrondfilter
Met dit filter zal de sensor trager reageren op snelle veranderingen in afstand. Bij voorkeur zullen de meest nabije objecten worden waargenomen. Denk hierbij aan de sproeiarm van een landbouwvoertuig. Het is van belang dat het object op de achtergrond, in dit geval de grond, genegeerd wordt. Hierdoor kan de sensor het object op de voorgrond waarnemen en dus de hoogte van bijvoorbeeld het gewas meten.

F04 – Achtergrondfilter
Met dit filter zal de sensor trager reageren op snelle veranderingen in nabijheid, bij voorkeur zullen de meest ver zijnde objecten worden waargenomen. Denk hierbij aan een ventilator die draait en genegeerd moet worden door de sensor, om een achterliggend object te kunnen waarnemen.

|
Filter |
Toepassing |
| F00 |
Geen filter |
Enkel voor onderzoek, niet aan te raden voor industriële toepassingen. |
| F01 |
Standaardfilter |
Aan te raden filter voor de meeste toepassingen. |
| F02 |
Middelend filter |
Klassieke middeling voor analoge sensoren om een stabiele uitgangswaarde te ontvangen. |
| F03 |
Voorgrondfilter |
Speciaal filter om dichtbij zijnde objecten waar te nemen en objecten op de achtergrond te negeren. |
| F04 |
Achtergrondfilter |
Speciaal filter om verder gelegen objecten waar te nemen en objecten in de voorgrond te negeren. |
Wat past het beste bij uw toepassing?
Welke sensor ondersteunt nu welk filter? In onderstaande tabel vindt u een overzicht van welk filter toegepast kan worden door microsonic sensoren.
|
F01 |
F02 |
F03 |
F04 |
| mic+ |
● |
● |
● |
● |
| mic |
● |
● |
● |
● |
| crm+ |
● |
● |
● |
● |
| hps+ |
● |
● |
● |
● |
| pico+ |
● |
● |
|
|
| lcs- |
● |
● |
● |
● |
| lcs+ |
● |
● |
● |
● |